
פרויקט זה מתאר כיצד ניתן להזיז מנוע DC בכיוון קדימה או אחורה באמצעות שלט רחוק של טלוויזיה או DVD.המטרה היא לבנות דרייבר מנוע דו-כיווני פשוט המשתמש ברכבת פולסים אינפרא-אדום (IR) 38kHz 38kHz למטרה ללא שימוש במיקרו-בקר או תכנות כלשהו.
אב הטיפוס של המחבר מוצג באיור 1.

מעגל ועבודה
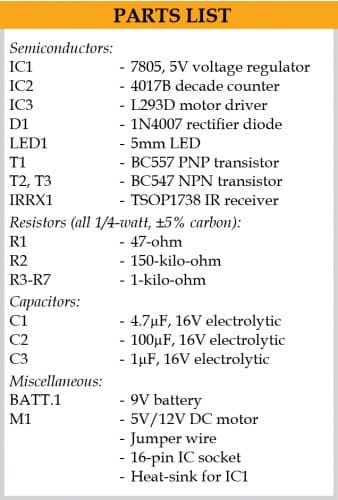
תרשים מעגל של הפרויקט מוצג באיור 2. הוא בנוי סביב מודול מקלט IR TSOP1738 (IRRX1), מונה עשור 4017B (IC2), נהג מנוע L293D (IC3), טרנזיסטור PNP BC557 (T1), שני טרנזיסטורים BC547 NPN ( T2 ו-T3), ספק כוח מווסת 5V (IC1), וסוללת 9V.
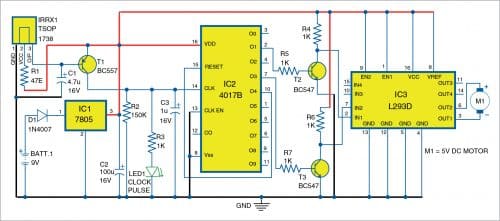
סוללת 9V מחוברת דרך דיודה D1 לווסת מתח 7805 כדי ליצור 5V DC הנדרש לפרויקט.קבל C2 (100µF, 16V) משמש לדחיית אדוות.
במצב רגיל, פין פלט 3 של מודול IR IRRX1 נמצא ברמת לוגיקה גבוהה, מה שאומר שהטרנזיסטור T1 המחובר אליו מנותק ולכן טרמינל הקולטור שלו נמצא ברמת לוגיקה נמוכה.האספן של T1 מניע את דופק השעון של מונה העשור IC2.
בהפניית השלט לכיוון מודול ה-IR ולחיצה על מקש כלשהו, המודול מקבל את פולסי ה-IR של 38kHz מהשלט.פולסים אלו הופכים בקולט של T1 וניתנים לפין כניסת שעון 14 של מונה העשור IC2.
פולסי ה-IR המגיעים מגדילים את מונה העשור באותו קצב (38kHz), אך בגלל נוכחותו של מסנן RC (R2=150k ו-C3=1µF) בפין כניסת שעון 14 של IC2, הרכבת הפולסים מופיעה כפולס בודד בשעה המונה.לפיכך, בלחיצה על כל מקש, המונה מתקדם בספירה בודדת בלבד.
כאשר מפתח השלט משתחרר, הקבל C3 נפרק דרך הנגד R2 וקו השעון הופך לאפס.כך שבכל פעם שהמשתמש לוחץ ומשחרר מקש בשלט, המונה מקבל פולס בודד בכניסת השעון שלו ו-LED1 זוהרת כדי לאשר שהפולס התקבל.
במהלך הפעולה יכולות להיות חמש אפשרויות:
תיק 1
כאשר מקש השלט נלחץ, הפולס הראשון מגיע ופלט O0 של מונה העשור (IC2) עולה גבוה בעוד הפינים O1 עד O9 נמוכים, מה שאומר שהטרנזיסטורים T2 ו-T3 נמצאים במצב ניתוק.הקולטים של שני הטרנזיסטורים נמשכים למצב גבוה על ידי נגדים של 1 קילו אוהם (R4 ו-R6), כך ששני מסופי הכניסה IN1 ו-IN2 של נהג המנוע L293D (IC3) הופכים גבוהים.בשלב זה, המנוע במצב כבוי.
מקרה 2
כאשר מקש נלחץ שוב, הדופק השני המגיע לקו CLK מגדיל את המונה באחת.כלומר, כאשר הפולס השני מגיע, פלט O1 של IC2 הולך גבוה, בעוד שהפלטים הנותרים נמוכים.אז טרנזיסטור T2 מוליך ו-T3 מנותק.מה שאומר שהמתח בקולט של T2 יורד (IN1 של IC3) והמתח בקולט של T3 הופך לגבוה (IN2 של IC3) והכניסות IN1 ו-IN2 של מנהל המנוע IC3 הופכות ל-0 ו-1, בהתאמה.במצב זה, המנוע מסתובב בכיוון קדימה.
מקרה 3
כאשר מקש נלחץ פעם נוספת, הדופק השלישי המגיע לקו CLK מגדיל את המונה באחת שוב.אז פלט O2 של IC2 הולך גבוה.מכיוון ששום דבר אינו מחובר לפין O2 ופיני המוצא O1 ו-O3 נמוכים, כך שני הטרנזיסטורים T2 ו-T3 עוברים למצב ניתוק.
מסופי האספן של שני הטרנזיסטורים נמשכים למצב גבוה על ידי נגדים של 1 קילו אוהם R4 ו-R6, מה שאומר שמסופי הכניסה IN1 ו-IN2 של IC3 הופכים גבוהים.בשלב זה, המנוע שוב במצב כבוי.
מקרה 4
כאשר מקש נלחץ פעם נוספת, הדופק הרביעי המגיע לקו CLK מגדיל את המונה באחת בפעם הרביעית.כעת פלט O3 של IC2 הולך גבוה, בעוד שהיציאות הנותרות נמוכות, כך שהטרנזיסטור T3 מוליך.מה שאומר שהמתח בקולט של T2 הופך גבוה (IN1 של IC3) והמתח בקולט של T3 הופך נמוך (IN2 של IC3).אז, כניסות IN1 ו-IN2 של IC3 הן ברמות 1 ו-0, בהתאמה.במצב זה, המנוע מסתובב בכיוון הפוך.
מקרה 5
כאשר מקש נלחץ בפעם החמישית, הדופק החמישי המגיע לקו CLK מגדיל את המונה באחת שוב.מכיוון ש-O4 (פין 10 של IC2) מחובר לפין כניסת איפוס 15 של ה-IC2, לחיצה בפעם החמישית מחזירה את מונה העשור IC למצב של הפעלה עם איפוס עם O0 גבוה.
לפיכך, המעגל פועל כנהג מנוע דו-כיווני הנשלט באמצעות שלט אינפרא אדום.
בנייה ובדיקה
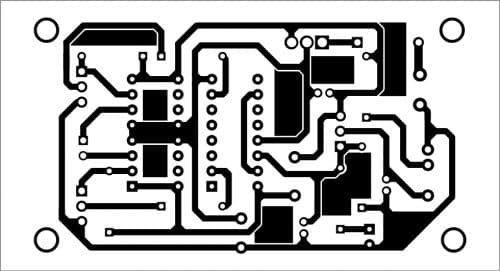
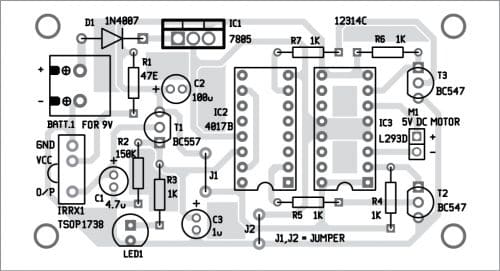
ניתן להרכיב את המעגל על גבי Veroboard או PCB אשר פריסת הגודל האמיתי שלו מוצגת באיור 3. פריסת הרכיבים עבור PCB מוצגת באיור 4.
הורד קובצי PDF של פריסת PCB ורכיבים:לחץ כאן
לאחר הרכבת המעגל, חבר סוללת 9V על פני BATT.1.עיין בטבלת האמת (טבלה 1) להפעלה ובצע את השלבים המתוארים במקרה 1 עד מקרה 5 לעיל.
עריכה על ידי ליסה
זמן פרסום: 29 בספטמבר 2021