

צג דיגיטלי במתח גבוה 220V Nema42 לולאה סגורה 12Nm מנוע צעד
סדרת NEMA42 Easy Servo (סדרת NEMA42 לולאה סגורה)
פרמטרים חשמליים של מנוע:
| מצב | זווית צעד | נוכחי (א) | התנגדות (Ω±10%) | הַשׁרָאוּת (mH±20%) | מומנט אחיזה (Nm) | אורך מנוע (מ"מ) | קוֹדַאִי רזולוציה (PPR) | דרייבר ישים |
| 110HCE12N-B39 | 1.2° | 4.2 | 1.2 | 13 | 12 | 139 | 1000 | 3HSS2260 |
| 110HCE20N-B39 | 1.2° | 4.2 | 1.88 | 18 | 20 | 221 | 1000 | 3HSS2260 |
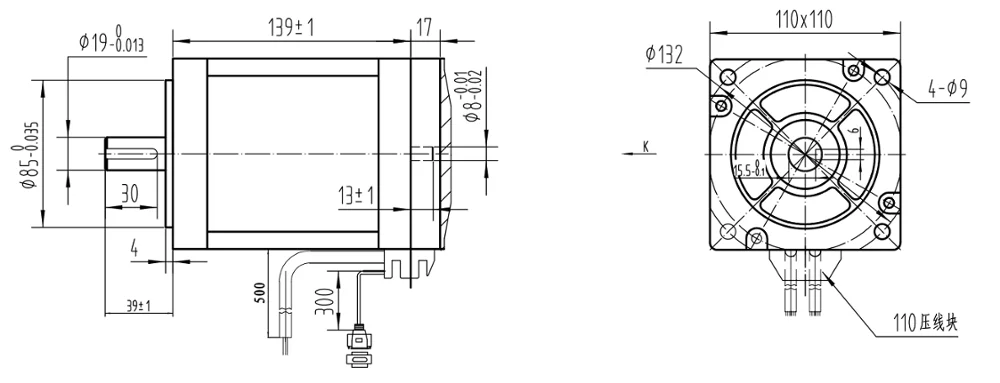
גודל מנוע: מ"מ
עקומת מומנט/תדר
מנהל התקן 3HSS2260
מאפיינים
1, 32 סיביות DSP וטכנולוגיית בקרת לולאה סגורה וקטורית
2, מבלי לאבד צעד, דיוק גבוה במיקום
3, שפר את מומנט תפוקת המנוע ומהירות העבודה
4, טכנולוגיית בקרת זרם משתנה, לרסן את עליית טמפרטורת המנוע
5, להתאים למגוון תנאי עומס מכני (כולל גלגלות בקשיחות נמוכה), לא
צריך להתאים את פרמטר הרווח
6, תנועה חלקה ואמינה, רטט נמוך, שיפור גדול בהאצה ו
לְהַאֵט
7, היכולת של סטטי במהירות אפס ללא רטט
8, התאמה למנוע סרוו היברידי 86(NEMA34) ו-110(NEMA 42) תלת פאזי
9, תדר פעימות צעד מקסימלי 200KHZ
10, מיקרו צעד 400-60000 דופק/סיבוב
11, טווח מתח AC150-240V
12, הגנה על זרם יתר, מתח יתר והגנת מיקום יתר
13, תצוגת שש צינורות דיגיטלית, קלה להגדיר פרמטרים ולפקח על הפעלת המנוע
מדינה
בחירת Microstep:
| קוד | הַגדָרָה | טווח | ערך ברירת מחדל | הֶעָרָה |
| PA0 | גרסת מספר | 501 | אסור לשנות | |
| PA1 | בחירת מצב שליטה | 0~2 | 0 | |
| PA2 | בחירת סוג מנוע | 0~2 | 0 | |
| PA3 | הפעלה לתצוגה | 0~7 | 0 | |
| PA4 | לולאה נוכחית Kp | 0~1000 | 200 | אסור לשנות |
| PA5 | לולאה נוכחית קי | 0~1000 | 300 | אסור לשנות |
| PA6 | לולאת מיקום Kp | 0~1000 | 300 | |
| PA7 | הגדרת מיקרו צעדים | 400~60000 | 4000 | |
| PA8 | רזולוציית מקודד (1000) | 4000 | אסור לשנות | |
| PA9 | רזולוציית מקודד (1000) | 40~30000 | 1000 | |
| PA10 | מחזיק זרם | 10~100 | 40 | |
| PA11 | זרם לולאה סגורה | 10~100 | 100 | |
| PA12 | הזמנה | |||
| PA13 | הזמנה | |||
| PA14 | אפשר רמה | 0/1 | 0 | |
| PA15 | רמת אזעקה | 0/1 | 0 | |
| PA16 | בחירת מצב דופק | 0/1 | 0 | |
| PA17 | Pulse Edge | 0/1 | 0 | |
| PA18 | כיוון סיבוב מנוע | 0/1 | 0 | |
| PA19 | מהירות JOG | 1~200 | 60 | |
| PA20 | סעיף מצב המתנה | 0/1 | 0 | |
| PA21 | רמת המתנה | 0/1 | 0 |
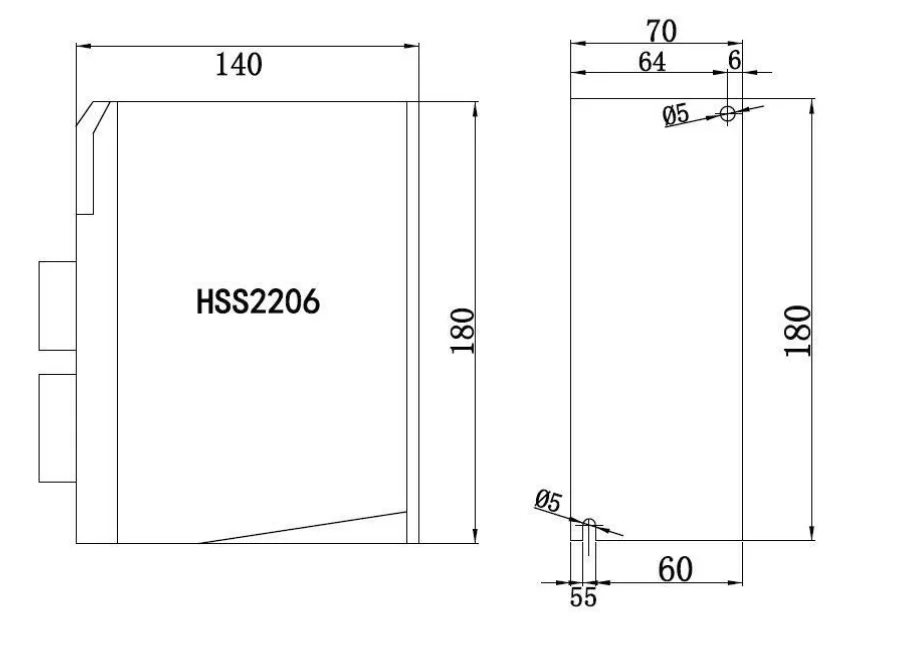
גודל הנהג (מ"מ):
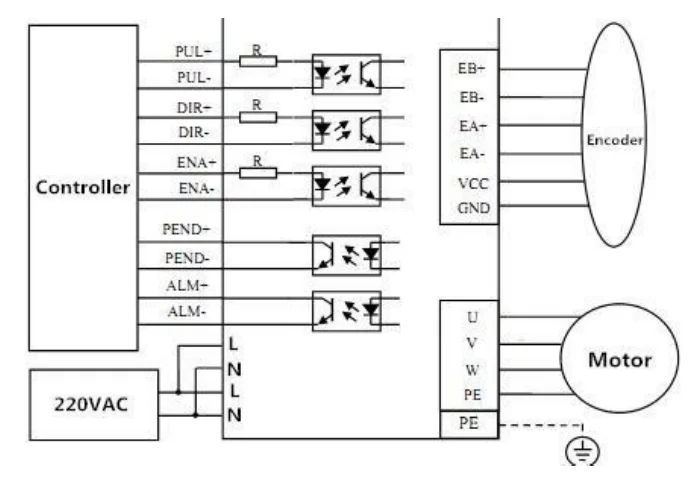
תרשים חיווט:



,planetary gearbox,worm gearbox,reliable and durable,suitable for all kinds of motors, such as dc motors ,servo motors and stepper motor,to get bigger torque")
